Electrical Engineering - Computer Vision Enthusiast
| The Wisp | |
|---|---|
|
| |
| Date | January 2020 - Current |
| Language | C, Python |
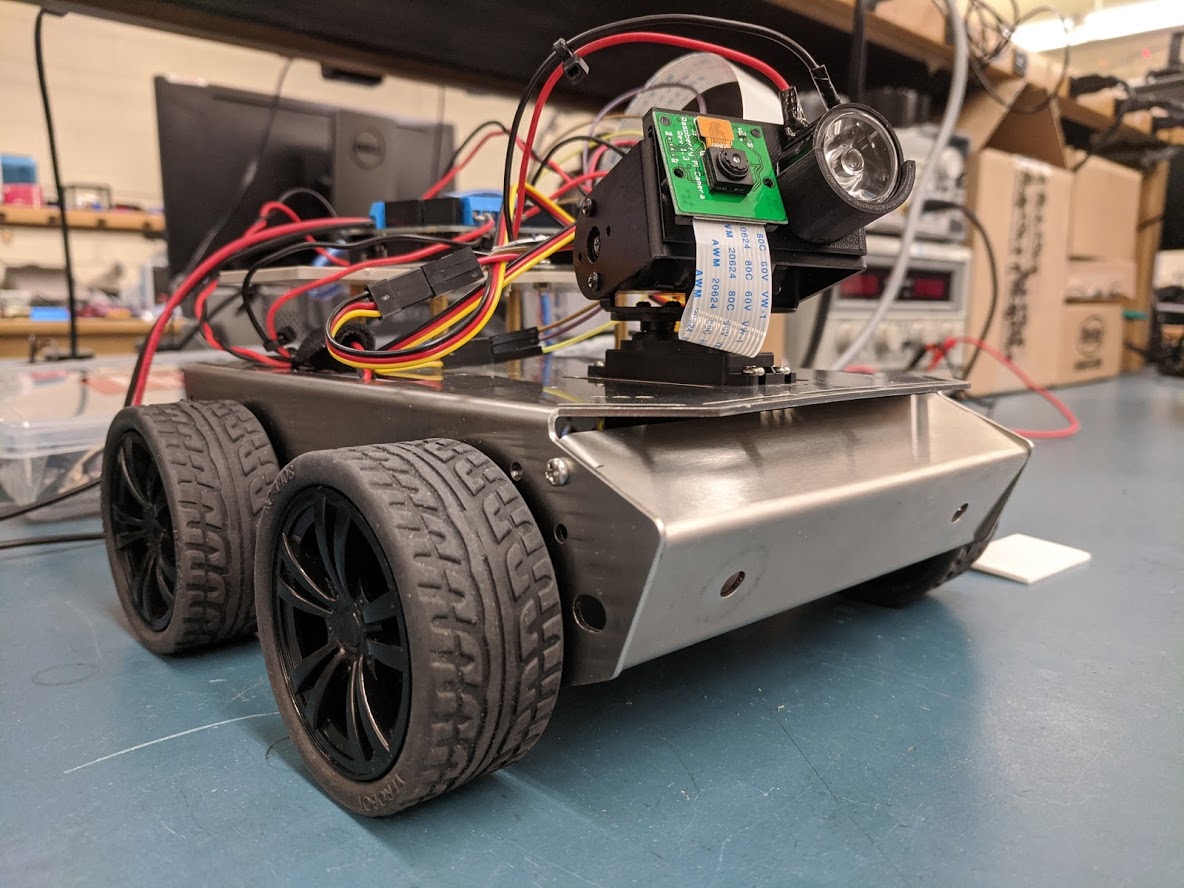
| Board | Raspberry Pi 4, Arduino Uno |
| Program | PyCharm, Arduino IDE |
| Peripherals | Motor Shield V2, RPLidar A1, Pi Camera |
| Github | Cancelled |
The “search” portion of search-and-rescue is a slow and methodical process with BCIT’s Light Urban Search-and-rescue Team (LUSAR). The time it would take to sweep a small office would be about two hours. Thus, we have made it our goal to speed up this process by developing a robotic tool to aid the LUSAR team in their procedure. Currently the LUSAR team only uses paper-based recording techniques and the five human sense to aid in their search. We aim to increase their efficiency and effectiveness by engineering a solution tailored to their needs. An operator controlled robotic vehicle, that comes equipped with four environmental sensors to help speed up their existing procedure named the Wisp.
Estimated Completion Date: May 2020
Update: Did not finish due to COVID-19.